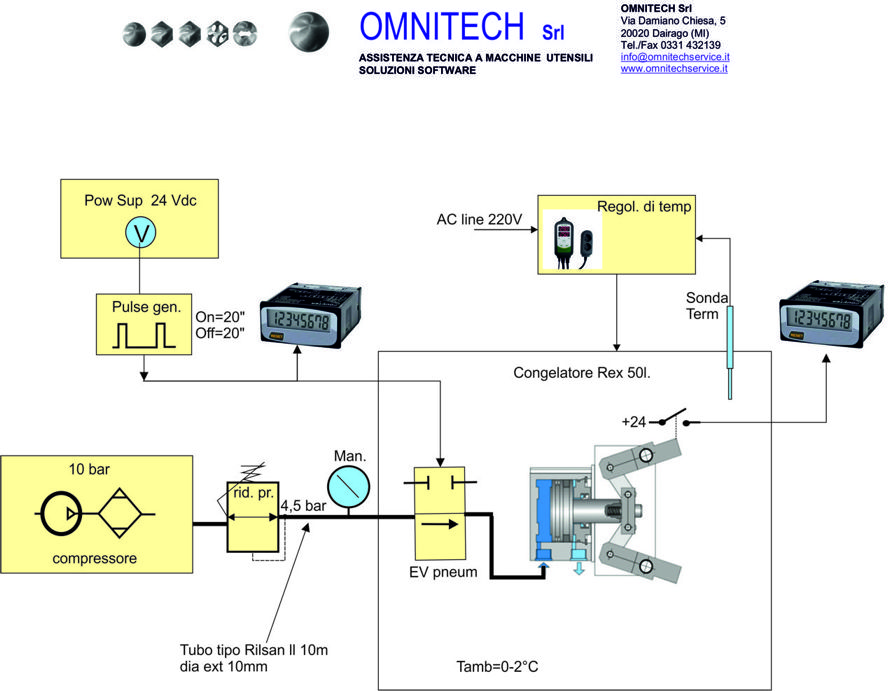
Malfunzionamenti random del manipolatore robotico
Durante il trasporto dei pezzi (lavorati da MU) verso la stazione di finitura, movimento effettuato dal manipolatore robotico, sono stati rilevati durante la stagione invernale, cali randoms della forza esercitata sulle pinze provocandone la caduta dei pezzi. Questa anomalia ci ha indotto a predisporre un sistema di test “a banco” con lo scopo di valutare il comportamento del manipolatore a bassa temperatura (0-2 °C) e con valori di pressione al minimo di specifica (4,5 bar). Ad oggi abbiamo accumulato nr 35.860 deviazioni riscontrando almeno #10 cedimenti di forza sulle pinze. Sono in corso azioni per rendere più affidabile il manipolatore.

