Il Robot sa come fare un buon caffe'
Luned�, 29 Giugno 2020 Robot barman
La scoperta del caffè fu, a suo modo, importante quanto l’invenzione del telescopio o del microscopio. Il caffè infatti ha inaspettatamente intensificato e modificato le capacità e la vivacità del cervello umano.
(Heinrich Eduard Jacob)
Il Robot conosce perfettamente la serie di regole per servire e gustare questa deliziosa bevanda.
Malfunzionamenti random del manipolatore robotico
Gioved�, 19 Aprile 2018 Malfunz del manipol. robotico
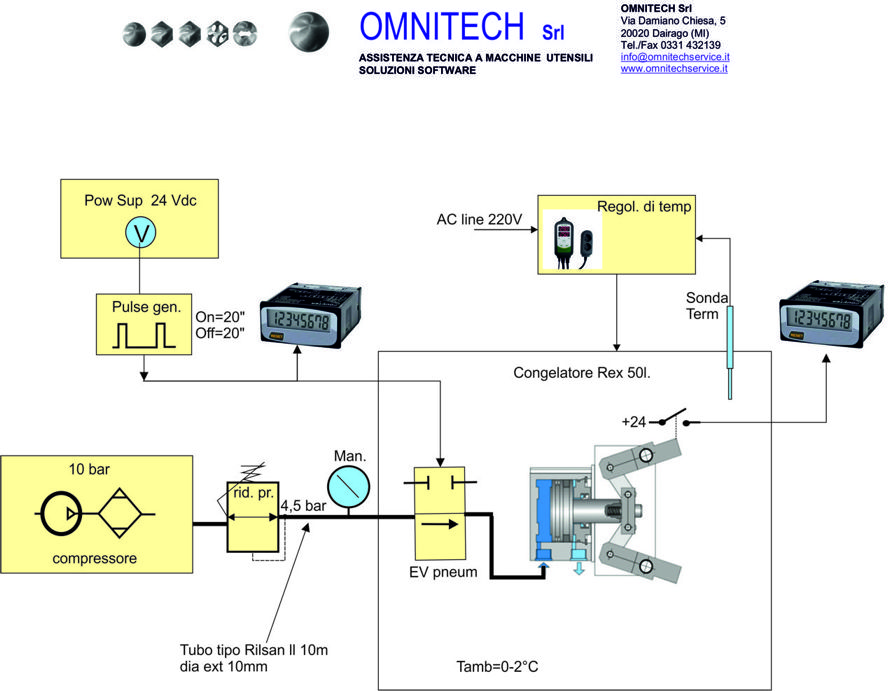
Durante il trasporto dei pezzi (lavorati da MU) verso la stazione di finitura, movimento effettuato dal manipolatore robotico, sono stati rilevati durante la stagione invernale, cali randoms della forza esercitata sulle pinze provocandone la caduta dei pezzi. Questa anomalia ci ha indotto a predisporre un sistema di test “a banco” con lo scopo di valutare il comportamento del manipolatore a bassa temperatura (0-2 °C) e con valori di pressione al minimo di specifica (4,5 bar). Ad oggi abbiamo accumulato nr 35.860 deviazioni riscontrando almeno #10 cedimenti di forza sulle pinze. Sono in corso azioni per rendere più affidabile il manipolatore.
Manutenzione predittiva su sistemi di picking
Marted�, 06 Giugno 2017 Manutenzione predittiva
A seguito di # 6 interventi di manutenzione in un solo mese “su chiamata” per blocco impianto di picking, sono stati sostituiti altrettanti teleruttori, pertanto Omnitech ha deciso di avviare un’analisi approfondita della tipologia di failures causate da questo componente ed ha proceduto nel modo seguente:
Manovre dei teleruttori
Ogni infeed movimenta #400 colli/h per 10 h giorno e per # 5gg lavorativi, pertanto in un anno le manovre effettuate dal teleruttore in un anno sono:#manovre (cicli) =400x10x5x52=1.040.000
Per tutti i componenti elettromeccanici, idraulici e meccanici soggetti a usura (es. relè ed elettrovalvole) il tasso di guasto aumenta con il numero di cicli lavorati, pertanto la loro affidabilità non viene in genere riferita al tempo per cui hanno lavorato bensì al numero di cicli effettuati.
Il parametro fornito dai costruttori è il B10d (numeri di manovre dopo le quali si verificano guasti nel 10 % dei componenti esaminati durante una prova della durata di esercizio sotto carico specificato).
Conoscendo il B10d e il numero medio di operazioni in un anno (Nop) si ricava il valore di MTTFd (nel seguente modo: MTTFd=B10d0,1xNop;
La vita utile del componente deve poi essere limitata a T10d = B10d / Nop (tempo entro il quale il 10% dei componenti può subire un guasto pericoloso). Questo tempo va confrontato col tempo di servizio della macchina, se risulta inferiore, il componente va sostituito un po’ prima della fine della sua vita utile.
I nostri dati:
B10d del teleruttore LP4K09004BW3a carico nominale è =1.369.863 (conforme alla EN/ISO 13849)
Nop =1.040.000 cicli anno quindiT10d13698631040000=1,3 anni di vita utile. Tutto questo avrebbe senso se il teleruttore fosse adatto a pilotare motori (componenti altamente induttivi) fosse cioè in classe AC2, AC3 (1) ma questo componente è in AC1 quindi la vita utile è sicuramente inferiore agli 1,3 anni.
Alla luce del valore di T10d di 1,3 anni ottenuto, abbiamo ritenuto indispensabile la sostituzione dei teleruttori al termine di un anno di vita.
Servire con proattività usando la manutenzione predittiva